Fusion of inertial and depth sensors for movement measurements and recognition
Abstract
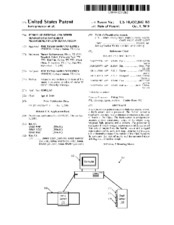
A movement recognition system includes an inertial sensor, a depth sensor, and a processor. The inertial sensor is coupled to an object and configured to measure a first unit of inertia of the object. The depth sensor is configured to measure a three dimensional shape of the object using projected light patterns and a camera. The processor is configured to receive a signal representative of the measured first unit of inertia from the inertial sensor and a signal representative of the measured shape from the depth sensor and to determine a type of movement of the object based on the measured first unit of inertia and the measured shape utilizing a classification model.
Collections
Citation
(2019). Fusion of inertial and depth sensors for movement measurements and recognition. United States. Patent and Trademark Office; Texas A&M University. Libraries. Available electronically from https : / /hdl .handle .net /1969 .1 /187393.